Learned Closure: Training a Neural Viscosity Model Through a PDE Solver (PyTorch)¶
In this tutorial, you will learn how to:
Build a Tesseract that wraps a single-timestep differentiable PDE solver (a 1D Burgers’ equation solver) and exposes a vector-Jacobian product.
Use Tesseract-Torch to call the served solver as a native PyTorch autograd layer via
apply_tesseract, so gradients flow through the container automatically.Train a neural network closure end-to-end through the containerized solver, differentiating through the entire time-stepping loop.
Compare the learned closure against baselines (a pure physics model and a pure ML model).
We will replace the viscosity model of a Burgers’ equation solver – normally a hand-tuned constant – with a small neural network, and train it so that it recovers the true (unknown) viscosity profile from solution data alone.
Context¶
Closure modeling is a recurring problem across computational science: a simulation resolves the large scales but needs a model for the unresolved physics – a turbulence closure, a sub-grid scheme, a constitutive law. These closures are often hand-tuned or empirical, and a natural idea is to learn them from data instead. The catch is that a closure only makes sense inside the solver: to train it well, gradients have to flow from the simulation output, through the solver, and back into the network.
This is hard in practice because the solver is usually not a 30-line function you can import into your training script. It is a heavyweight simulator with its own runtime, dependencies, and adjoint – a Fortran/C++ CFD code, a legacy in-house solver, or something differentiated by Enzyme at the LLVM IR level.
With Tesseracts, we wrap the solver in a container that exposes a clean differentiable interface, and call it over HTTP as a single layer inside an otherwise ordinary PyTorch training loop. The neural network lives in native PyTorch; the solver lives in a Docker image. Tesseract-Torch registers the served solver as a PyTorch autograd custom function, so loss.backward() dispatches a vector-Jacobian product (VJP) call back through the solver automatically – the analogue of what Tesseract-JAX does for JAX in the other demos in this series.
The components¶
burgers_solver(containerized Tesseract): a single-timestep Burgers’ equation solver. Takes the current velocity fielduand a viscosity fieldnu, returns the velocity field after one explicit Euler step – a pure physics component with the interface \((u, \nu, dt) \to u_\text{next}\). It exposes a VJP, so it slots into PyTorch autograd like any other layer, even though it runs in a separate container.ViscosityNet(torch.nn.Module): a small MLP that maps local flow features \((u, \partial u/\partial x, x)\) to a viscosity field \(\nu\). An ordinary network, trained with a standard optimizer, in this process.
The outer time-stepping loop calls the network directly and the solver via apply_tesseract:
for each timestep:
nu = viscosity_net(u, dudx, x) # plain torch, in-process
u_next = apply_tesseract(solver, {u, nu, dt})["u_next"] # HTTP call to container
u = u_next
To learn more about building and running Tesseracts, please refer to the Tesseract documentation.
import os
import matplotlib.pyplot as plt
import numpy as np
import torch
import torch.nn as nn
from tesseract_torch import apply_tesseract
from tesseract_core import Tesseract
torch.set_default_dtype(torch.float64)
# Workload size. Every solver call is an HTTP round-trip to the container, so
# the defaults are modest to keep the demo (and CI) to a few minutes.
# Set FULL_RUN=1 for the publication-quality run used to produce the figures.
FULL_RUN = os.environ.get("FULL_RUN", "0") == "1"
# Time step. The spatially-varying viscosity only becomes identifiable once
# diffusion has acted appreciably over the rollout, so we use a dt large enough
# for the closure to actually "feel" the viscosity profile (well within the
# explicit-diffusion CFL limit nu*dt/dx^2 < 0.5). Too small a dt and every
# viscosity profile fits the data equally well — the closure can't recover the
# shape no matter how long it trains.
DT = 3e-4
LR = 5e-3
if FULL_RUN:
N_TRAIN, N_TEST = 8, 4
N_STEPS = 80
N_EPOCHS = 300
DIRECT_EPOCHS = 300
else:
# Small but enough to recover the viscosity hump and beat the constant
# baseline.
N_TRAIN, N_TEST = 3, 2
N_STEPS = 40
N_EPOCHS = 100
DIRECT_EPOCHS = 100
print(
f"FULL_RUN={FULL_RUN}: {N_TRAIN} train / {N_TEST} test ICs, "
f"{N_STEPS} steps, {N_EPOCHS} epochs, dt={DT}"
)
# Grid setup (must match the solver)
N = 128
DX = 1.0 / (N - 1)
X = torch.linspace(0.0, 1.0, N)
FULL_RUN=False: 3 train / 2 test ICs, 40 steps, 100 epochs, dt=0.0003
Step 1: Build and serve the solver Tesseract¶
We build the solver into a Docker image with tesseract build, then serve it in a container and call it over HTTP – the same way you would deploy a real simulator. The training loop below never imports the solver’s code; it only ever talks to the running container.
First, build the image (this can take a few minutes the first time):
%%bash
tesseract build burgers_solver/
[i] Building image ...
⠇ Processing
[i] Built image sha256:1506efb7dade, ['burgers-solver:0.1.0', 'burgers-solver:latest']
["burgers-solver:0.1.0", "burgers-solver:latest"]
Now load the built image and start a server container. serve() launches the container; we tear it down at the end of the notebook to free resources.
solver_tess = Tesseract.from_image("burgers-solver")
solver_tess.serve()
print(f"Solver endpoints: {solver_tess.available_endpoints}")
Solver endpoints: ['apply', 'jacobian', 'jacobian_vector_product', 'vector_jacobian_product', 'health', 'abstract_eval', 'test']
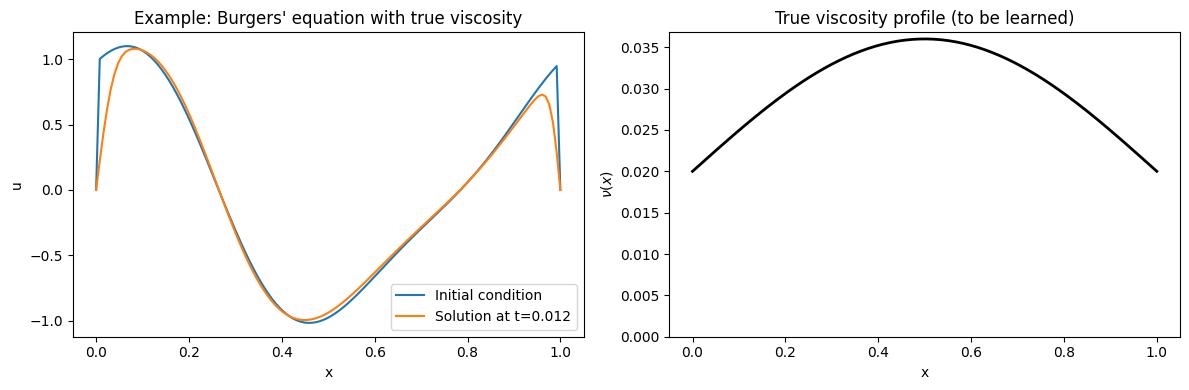
Step 2: The ground truth – Burgers’ equation with spatially-varying viscosity¶
We generate training data from a Burgers’ equation with a known but non-trivial viscosity profile:
This represents a spatially-varying material property – analogous to a turbulence closure, constitutive law, or sub-grid model that varies across the domain. The neural closure’s job is to recover this profile from solution data alone.
The reference solutions come from the same served solver, called forward-only (no gradients) – there is no second copy of the physics anywhere in this notebook.
# True viscosity profile
NU_0 = 0.02
A = 0.8
nu_true = NU_0 * (1.0 + A * torch.sin(np.pi * X))
def burgers_reference(u0, nu_field, dt, n_steps):
"""Reference solution with a prescribed viscosity field (no neural network).
Calls the served solver Tesseract forward-only via `.apply()`. This is just
data generation, so it stays outside autograd. `.apply()` returns decoded
NumPy arrays, which we wrap back into tensors.
"""
u = u0.clone()
for _ in range(n_steps):
out = solver_tess.apply({"u": u, "nu": nu_field, "dt": dt})
# .apply() returns a (possibly read-only) NumPy array decoded from JSON;
# copy into a fresh tensor so PyTorch is happy.
u = torch.tensor(np.asarray(out["u_next"]))
return u
def make_ic(seed):
"""Random smooth initial condition: sum of low-frequency sinusoids."""
rng = torch.Generator().manual_seed(seed)
a1 = 0.5 + 0.5 * torch.rand(1, generator=rng).item()
a2 = 0.3 * torch.rand(1, generator=rng).item()
phase = torch.rand(1, generator=rng).item() * np.pi
u0 = a1 * torch.sin(2 * np.pi * X + phase) + a2 * torch.sin(4 * np.pi * X)
u0[0] = 0.0
u0[-1] = 0.0
return u0
train_ics = torch.stack([make_ic(i) for i in range(N_TRAIN)])
test_ics = torch.stack([make_ic(N_TRAIN + i) for i in range(N_TEST)])
with torch.no_grad():
train_targets = torch.stack(
[burgers_reference(ic, nu_true, DT, N_STEPS) for ic in train_ics]
)
test_targets = torch.stack(
[burgers_reference(ic, nu_true, DT, N_STEPS) for ic in test_ics]
)
print(f"Training set: {N_TRAIN} initial conditions -> solutions")
print(f"Test set: {N_TEST} initial conditions -> solutions")
print(f"Grid: {N} points, dt={DT}, {N_STEPS} steps")
# Visualize one example
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
axes[0].plot(X.numpy(), train_ics[0].numpy(), label="Initial condition")
axes[0].plot(
X.numpy(), train_targets[0].numpy(), label=f"Solution at t={DT * N_STEPS:.3f}"
)
axes[0].set_xlabel("x")
axes[0].set_ylabel("u")
axes[0].legend()
axes[0].set_title("Example: Burgers' equation with true viscosity")
axes[1].plot(X.numpy(), nu_true.numpy(), "k-", linewidth=2)
axes[1].set_xlabel("x")
axes[1].set_ylabel(r"$\nu(x)$")
axes[1].set_title("True viscosity profile (to be learned)")
axes[1].set_ylim(bottom=0)
plt.tight_layout()
plt.show()
Training set: 3 initial conditions -> solutions
Test set: 2 initial conditions -> solutions
Grid: 128 points, dt=0.0003, 40 steps
Step 3: The neural closure – a plain PyTorch module¶
The closure is an ordinary torch.nn.Module: a small MLP with 2 hidden layers of 32 units. It maps the local flow features \((u, \partial u/\partial x, x)\) at each grid point to a viscosity value. There is nothing Tesseract-specific about it – it is the network the closure researcher brings, trained with a standard optimizer, entirely in this process.
A sigmoid keeps the predicted viscosity in a physically reasonable range \([0, \nu_{\max}]\), which also prevents CFL violations in the explicit solver.
class ViscosityNet(nn.Module):
"""MLP closure: local flow features (u, du/dx, x) -> viscosity nu."""
def __init__(self, hidden_dim=32, nu_max=0.05):
super().__init__()
self.nu_max = nu_max
self.net = nn.Sequential(
nn.Linear(3, hidden_dim),
nn.Tanh(),
nn.Linear(hidden_dim, hidden_dim),
nn.Tanh(),
nn.Linear(hidden_dim, 1),
)
def forward(self, u, dudx, x):
features = torch.stack([u, dudx, x], dim=-1) # (N, 3)
out = self.net(features)[:, 0] # (N,)
return self.nu_max * torch.sigmoid(out)
torch.manual_seed(1)
closure = ViscosityNet()
n_params = sum(p.numel() for p in closure.parameters())
print(f"Closure parameters: {n_params}")
# Sanity check: the untrained closure produces sensible viscosities
with torch.no_grad():
dudx0 = torch.gradient(train_ics[0], spacing=(DX,))[0]
nu0 = closure(train_ics[0], dudx0, X)
print(f"Initial viscosity range: [{float(nu0.min()):.4f}, {float(nu0.max()):.4f}]")
Closure parameters: 1217
Initial viscosity range: [0.0204, 0.0310]
Step 4: End-to-end training through the containerized solver¶
The training loss is:
where \(\nu_\theta\) is the neural viscosity closure with parameters \(\theta\), and \(u_{\text{solver}}\) runs the full Burgers’ equation with \(\nu_\theta\) called at every timestep.
The time-stepping loop calls the network directly and the solver via apply_tesseract:
for each timestep:
nu = closure(u, dudx, x) # plain torch
u = apply_tesseract(solver, {u, nu, dt})["u_next"] # HTTP call to container
loss.backward() differentiates through the entire loop – through every timestep, through a VJP HTTP request to the container at each step, and into the network weights – automatically.
def solve_with_closure(u0, closure, dt, n_steps):
"""Run the full time-stepping loop, calling the served solver each step.
The closure is plain in-process PyTorch; the solver is the containerized
differentiable layer, reached over HTTP. In production this same loop would
drive a Fortran solver with an adjoint — only the served image changes.
"""
u = u0
for _step in range(n_steps):
dudx = torch.zeros_like(u)
dudx[1:-1] = (u[2:] - u[:-2]) / (2 * DX)
nu = closure(u, dudx, X) # closure: predict viscosity (native torch)
# Solver: one explicit Euler step, executed in the container
solver_out = apply_tesseract(solver_tess, {"u": u, "nu": nu, "dt": dt})
u = solver_out["u_next"]
return u
def loss_batch(closure, ics, targets):
"""Mean MSE over a batch of initial conditions."""
preds = torch.stack(
[solve_with_closure(ics[i], closure, DT, N_STEPS) for i in range(ics.shape[0])]
)
return torch.mean((preds - targets) ** 2)
# Verify the forward pass + gradient flow
print("Testing forward pass + gradient...")
l0 = loss_batch(closure, train_ics, train_targets)
l0.backward()
grad_norm = torch.sqrt(
sum(p.grad.pow(2).sum() for p in closure.parameters() if p.grad is not None)
)
print(f" Initial loss: {float(l0.detach()):.6e}")
print(f" Gradient norm: {float(grad_norm):.6e}")
print(" Gradients flow: loss -> solver VJP (HTTP) -> network weights.")
closure.zero_grad()
Testing forward pass + gradient...
Initial loss: 1.356501e-04
Gradient norm: 1.082265e-03
Gradients flow: loss -> solver VJP (HTTP) -> network weights.
Gradient validation against finite differences¶
Correctness check: the AD gradient (loss → solver VJP over HTTP → network) matches finite differences to high precision.
# Finite difference check on a single weight element of the first layer.
ics_sub = train_ics[:2]
tgt_sub = train_targets[:2]
# AD gradient
closure.zero_grad()
loss_val = loss_batch(closure, ics_sub, tgt_sub)
loss_val.backward()
w = closure.net[0].weight.data # first Linear layer (raw tensor, no autograd)
idx = (0, 0)
ad = float(closure.net[0].weight.grad[idx])
# Finite difference
eps = 1e-5
orig = w[idx].item()
with torch.no_grad():
w[idx] = orig + eps
l_plus = float(loss_batch(closure, ics_sub, tgt_sub))
w[idx] = orig - eps
l_minus = float(loss_batch(closure, ics_sub, tgt_sub))
w[idx] = orig # restore
fd = (l_plus - l_minus) / (2 * eps)
rel_err = abs(ad - fd) / (abs(fd) + 1e-30)
print(f"{'AD':>14s} {'FD':>14s} {'Rel. Error':>12s}")
print(f"{ad:14.6e} {fd:14.6e} {rel_err:12.2e}")
closure.zero_grad()
AD FD Rel. Error
-8.149260e-07 -8.149260e-07 1.34e-08
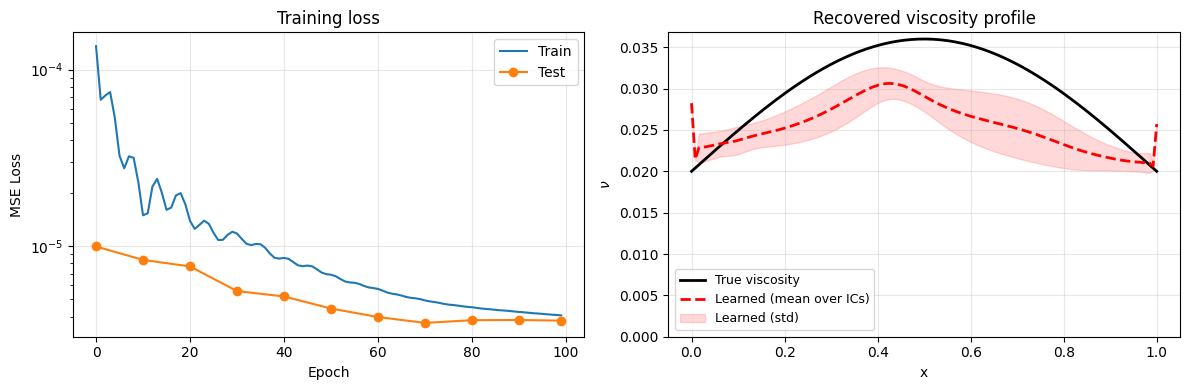
Training loop¶
# Re-initialize for a clean training run
torch.manual_seed(1)
closure = ViscosityNet()
optimizer = torch.optim.Adam(closure.parameters(), lr=LR)
train_losses = []
test_losses = []
print("Training neural closure through the solver...")
for epoch in range(N_EPOCHS):
optimizer.zero_grad()
train_loss = loss_batch(closure, train_ics, train_targets)
train_loss.backward()
optimizer.step()
train_losses.append(float(train_loss.detach()))
if epoch % 10 == 0 or epoch == N_EPOCHS - 1:
with torch.no_grad():
test_loss = float(loss_batch(closure, test_ics, test_targets))
test_losses.append((epoch, test_loss))
print(
f" Epoch {epoch:4d}: train loss = {train_losses[-1]:.4e}, "
f"test loss = {test_loss:.4e}"
)
print(f"\nFinal train loss: {train_losses[-1]:.4e}")
print(f"Final test loss: {test_losses[-1][1]:.4e}")
Training neural closure through the solver...
Epoch 0: train loss = 1.3565e-04, test loss = 9.9687e-06
Epoch 10: train loss = 1.4967e-05, test loss = 8.3721e-06
Epoch 20: train loss = 1.3913e-05, test loss = 7.6863e-06
Epoch 30: train loss = 1.1806e-05, test loss = 5.5764e-06
Epoch 40: train loss = 8.5923e-06, test loss = 5.1974e-06
Epoch 50: train loss = 6.8999e-06, test loss = 4.4420e-06
Epoch 60: train loss = 5.7348e-06, test loss = 3.9761e-06
Epoch 70: train loss = 4.9379e-06, test loss = 3.6837e-06
Epoch 80: train loss = 4.5155e-06, test loss = 3.8148e-06
Epoch 90: train loss = 4.2492e-06, test loss = 3.8258e-06
Epoch 99: train loss = 4.0613e-06, test loss = 3.7934e-06
Final train loss: 4.0613e-06
Final test loss: 3.7934e-06
fig, axes = plt.subplots(1, 2, figsize=(12, 4))
axes[0].semilogy(train_losses, label="Train")
test_epochs, test_vals = zip(*test_losses, strict=False)
axes[0].semilogy(test_epochs, test_vals, "o-", label="Test")
axes[0].set_xlabel("Epoch")
axes[0].set_ylabel("MSE Loss")
axes[0].set_title("Training loss")
axes[0].legend()
axes[0].grid(True, alpha=0.3)
# Compare learned viscosity to true viscosity, averaged over training ICs.
nu_samples = []
with torch.no_grad():
for ic in train_ics:
dudx = torch.zeros_like(ic)
dudx[1:-1] = (ic[2:] - ic[:-2]) / (2 * DX)
nu_samples.append(closure(ic, dudx, X))
nu_samples = torch.stack(nu_samples)
nu_mean = nu_samples.mean(dim=0)
nu_std = nu_samples.std(dim=0)
x_np = X.numpy()
axes[1].plot(x_np, nu_true.numpy(), "k-", linewidth=2, label="True viscosity")
axes[1].plot(x_np, nu_mean.numpy(), "r--", linewidth=2, label="Learned (mean over ICs)")
axes[1].fill_between(
x_np,
(nu_mean - nu_std).numpy(),
(nu_mean + nu_std).numpy(),
color="r",
alpha=0.15,
label="Learned (std)",
)
axes[1].set_xlabel("x")
axes[1].set_ylabel(r"$\nu$")
axes[1].set_title("Recovered viscosity profile")
axes[1].legend(fontsize=9)
axes[1].set_ylim(bottom=0)
axes[1].grid(True, alpha=0.3)
plt.tight_layout()
plt.show()
Step 5: Baselines¶
We compare three approaches:
Model |
Description |
|---|---|
Constant viscosity |
Burgers’ solver with \(\nu = \nu_0\) (the standard “wrong” closure) |
Direct ML |
MLP trained to map \(u_0 \to u_\text{final}\) directly, no physics |
Learned closure |
Neural \(\nu(u, \partial u/\partial x, x)\) trained through the solver (this demo) |
# --- Baseline 1: Constant (wrong) viscosity ---
nu_const = NU_0 * torch.ones(N)
with torch.no_grad():
const_preds_test = torch.stack(
[burgers_reference(ic, nu_const, DT, N_STEPS) for ic in test_ics]
)
const_mse = float(torch.mean((const_preds_test - test_targets) ** 2))
print(f"Constant viscosity test MSE: {const_mse:.4e}")
# --- Baseline 2: Direct ML (MLP mapping u0 -> u_final, no physics) ---
class DirectNet(nn.Module):
"""Pure ML: maps the whole field u0 directly to u_final."""
def __init__(self, n=N, hidden=128):
super().__init__()
self.net = nn.Sequential(
nn.Linear(n, hidden),
nn.Tanh(),
nn.Linear(hidden, hidden),
nn.Tanh(),
nn.Linear(hidden, 64),
nn.Tanh(),
nn.Linear(64, n),
)
def forward(self, u0):
return self.net(u0)
def direct_loss(model, ics, targets):
preds = model(ics)
return torch.mean((preds - targets) ** 2)
torch.manual_seed(2)
direct = DirectNet()
direct_opt = torch.optim.Adam(direct.parameters(), lr=1e-3)
print("\nTraining direct ML baseline...")
for epoch in range(DIRECT_EPOCHS):
direct_opt.zero_grad()
dl = direct_loss(direct, train_ics, train_targets)
dl.backward()
direct_opt.step()
if epoch % 20 == 0:
with torch.no_grad():
test_dl = float(direct_loss(direct, test_ics, test_targets))
print(
f" Epoch {epoch:4d}: train = {float(dl.detach()):.4e}, test = {test_dl:.4e}"
)
with torch.no_grad():
direct_test_mse = float(direct_loss(direct, test_ics, test_targets))
print(f"\nDirect ML test MSE: {direct_test_mse:.4e}")
# --- Learned closure (already trained above) ---
with torch.no_grad():
learned_test_mse = float(loss_batch(closure, test_ics, test_targets))
print(f"Learned closure test MSE: {learned_test_mse:.4e}")
print(f"\n{'Model':<25s} {'Test MSE':>12s}")
print("-" * 40)
print(f"{'Constant viscosity':<25s} {const_mse:12.4e}")
print(f"{'Direct ML':<25s} {direct_test_mse:12.4e}")
print(f"{'Learned closure':<25s} {learned_test_mse:12.4e}")
Constant viscosity test MSE: 8.7019e-06
Training direct ML baseline...
Epoch 0: train = 3.3253e-01, test = 2.0101e-01
Epoch 20: train = 3.6253e-02, test = 1.0957e-01
Epoch 40: train = 4.0090e-03, test = 7.0837e-02
Epoch 60: train = 1.2066e-03, test = 7.3164e-02
Epoch 80: train = 6.3926e-04, test = 7.5776e-02
Direct ML test MSE: 7.6441e-02
Learned closure test MSE: 3.7934e-06
Model Test MSE
----------------------------------------
Constant viscosity 8.7019e-06
Direct ML 7.6441e-02
Learned closure 3.7934e-06
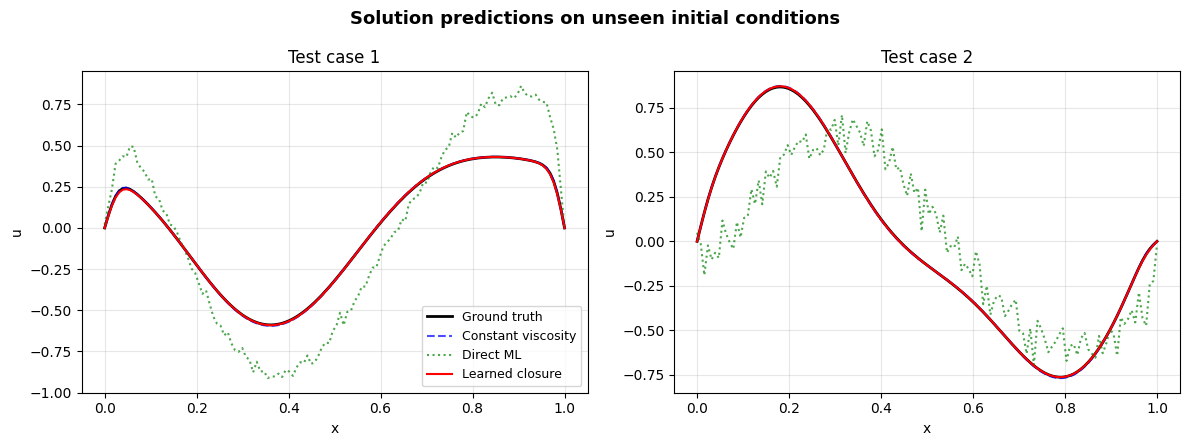
Step 6: Solution comparison on test data¶
For unseen initial conditions, we compare the three models’ predictions against the ground truth.
n_show = min(4, N_TEST)
ncols = 2 if n_show > 1 else 1
nrows = (n_show + ncols - 1) // ncols
fig, axes = plt.subplots(nrows, ncols, figsize=(6 * ncols, 4.5 * nrows), squeeze=False)
with torch.no_grad():
direct_preds = direct(test_ics)
for idx in range(n_show):
ax = axes[idx // ncols][idx % ncols]
ic = test_ics[idx]
target = test_targets[idx]
const_pred = burgers_reference(ic, nu_const, DT, N_STEPS)
direct_pred = direct_preds[idx]
learned_pred = solve_with_closure(ic, closure, DT, N_STEPS)
ax.plot(x_np, target.numpy(), "k-", linewidth=2, label="Ground truth")
ax.plot(
x_np,
const_pred.numpy(),
"b--",
linewidth=1.5,
alpha=0.7,
label="Constant viscosity",
)
ax.plot(
x_np, direct_pred.numpy(), "g:", linewidth=1.5, alpha=0.7, label="Direct ML"
)
ax.plot(
x_np, learned_pred.numpy(), "r-", linewidth=1.5, label="Learned closure"
)
ax.set_xlabel("x")
ax.set_ylabel("u")
ax.set_title(f"Test case {idx + 1}")
ax.grid(True, alpha=0.3)
if idx == 0:
ax.legend(fontsize=9)
plt.suptitle(
"Solution predictions on unseen initial conditions", fontsize=13, fontweight="bold"
)
plt.tight_layout()
plt.show()
Tear down the solver¶
Stop the solver container to free resources.
# Tear down Tesseract after use to prevent resource leaks
solver_tess.teardown()
Takeaways¶
In this tutorial, we trained a neural viscosity closure end-to-end through a containerized Burgers’ equation solver. Here are the key points:
Containerized solver, native ML. The Burgers’ solver runs in a Docker container served as a Tesseract, while the neural viscosity closure is a plain in-process
torch.nn.Module. The two are composed in an outer time-stepping loop:closure(...)thenapply_tesseract(solver, ...)over HTTP at each step.End-to-end gradients through the container. Because Tesseract-Torch registers the served solver as a PyTorch autograd function,
loss.backward()dispatches the solver’s VJP over HTTP and flows the gradient into the network – no hand-coded plumbing. We validated these gradients against finite differences.Physics structure beats both extremes. The learned closure achieves lower test MSE than either a constant-viscosity physics model or a pure ML model, recovering the true viscosity profile from solution data alone.
Composability across a container boundary. The closure (plain torch) and the solver (a different image exposing the same \((u, \nu, dt) \to u_\text{next}\) contract) can be swapped independently. The training loop is identical regardless of what language the solver is written in or how its adjoint is produced.
What’s next¶
Wrap a legacy solver. Replace the Burgers’ Tesseract with a Fortran/C++ solver that exposes an adjoint (for example via Enzyme). The closure training loop above works unchanged – only the image name changes.
Scale up. Move to larger grids, 2D/3D problems, or richer closures (convolutional, attention-based). Batch multiple initial conditions per request to amortize HTTP overhead.
Tackle a real closure. Swap the Burgers’ equation for a turbulence model, a climate sub-grid scheme, or a materials constitutive law.
Explore other demos. See the CFD optimization, FEM shape optimization, and data assimilation demos for the JAX side of the same composition pattern.
Questions? Feedback? Please reach out through the Tesseract Community Forum.